

-
nytt chassis, prototype i aluminium, vill bli laget i fiber, for ĺ spare vekt. resistance is futile!

-
Kult. Har selv brukt xbee en del, men aldri tenkt eller fĺtt med meg at det var 2,4ghz.
Gleder meg til video.Leave a comment:
-
joda, det gjřr de. ganske sĺ enkelt ĺ bygge sin egen radio av to arduinokompatibele kort og exbee. jeg har bestilt mange av delene til radioen, er her om en 3-4 uker. her er bilder av den ferdigstilte roboten, ved siden av en 1:10 bil for skalaens skyld. ble egentlig litt střrre en jeg trodde:


mĺ tweakes litt mer med programvaren fřr jeg tar video.Leave a comment:
-
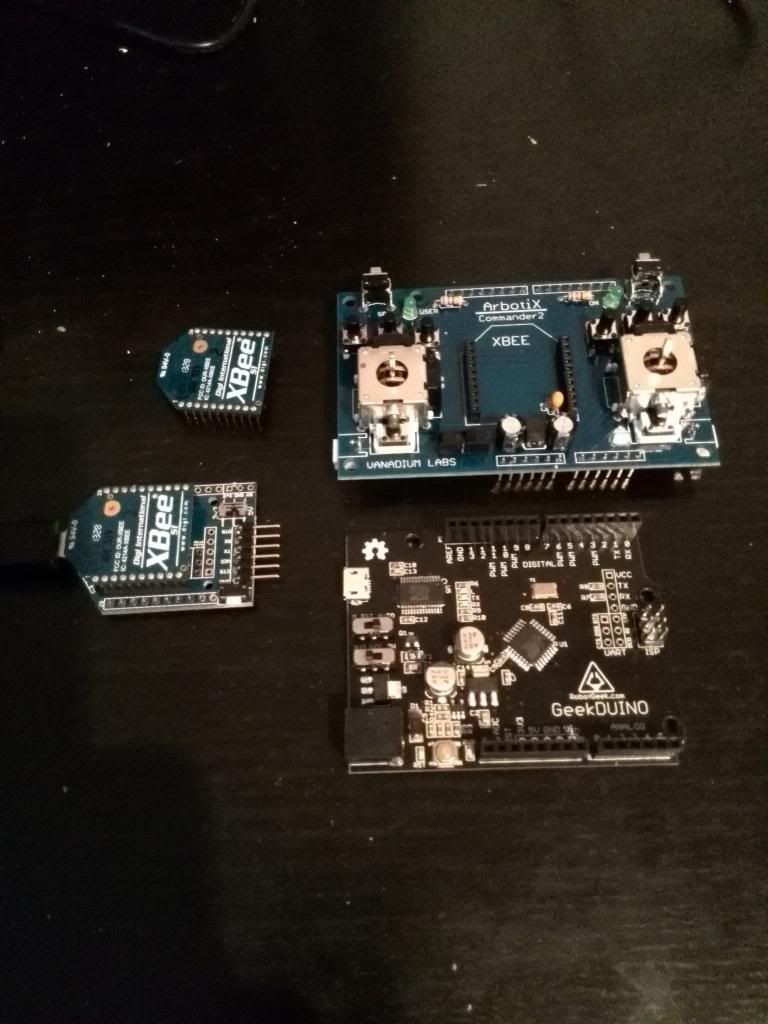
er ferdig med kroppen nĺ, har begynt pĺ kontrolleren. den bestĺr av et atmega 328 basert kort, samt en pĺbyggingsmodul (shield) som plugger inn i den, der man igjen plugger inn 2.4 ghz modulen. disse mĺ pares, det gjřres via en usb adapter, til hřyre i bildet.

Leave a comment:
-
Jřsses, her blir det masse fin leamikk Spennande og avanserte greier dette ser det ut som!
Spennande og avanserte greier dette ser det ut som!
Leave a comment:
-
etter ĺ ha utbetalt 2216 arktiske fjelldollar i merverdi avgift pĺ mitt lokal post i butikk, var delene hurtig lagt utover bordet.

etter en rask opptelling og sortering begynte jeg med trinn 1, programmering av servoene. det foregĺr ved at man plugger inn arduinoen i en ledig usb port via en overgang, og deretter plugger inn en servo i arduinoen, og kjřrer et program. i dette programmet setter du en id til hver servo, samtidig settes baudraten for hver servo. man kan ogsĺ funksjonsteste servoen i overnevnte program. det er er ogsĺ viktig ĺ sentrere servoen, fřr man gĺr over til neste. det fulgte med nummererte merker til ĺ sette pĺ hver servo, slik at monteringen blir mer oversiktelig.
her er alle servoene programert:

er halvveis med bena nĺ og har begynt med kroppen. det er latterlig mange skruer, 72 per bein
Leave a comment:
-
kommer til ĺ poste litt bilder underveis ja, men med mest fokus pĺ modifikasjoner. bestilte med seks ekstra servoer, for ĺ lage en klo foran, alla denne: http://www.crustcrawler.com/products...pper/index.php
rammen er laget av pleksiglass, som er bĺde tungt og sprřtt. derfor vil jeg lage hovedrammen i glass eller karbonfiber, og ytterste ledd pĺ fřttene (tibia) i aluminium. har enda ikke funnet et sted som selger karbonfiber i sĺ store plater til en fornuftig pris, men har begynt ĺ tegne nye fřtter i aluminium.
sbus systemene er fine de, men da denne roboten trenger en kontroller til ĺ utfřre beregningene til kinematikken som holder styr pĺ hvor ben skal plasseres, og input fra sensorer, mĺ man ha en kontroller for dette. med i pakken jeg kjřpte er det en arobotix-m, som har mange gode funksjoner for begynnere:

trossenroboticks har veldig gode forklaring pĺ produktene sine, noe som reduserer lćringskurven betraktelig. ser frem til ĺ begyne ĺ tukle med dette nĺ
Leave a comment:
-
Veldig třft! masse bilder og speqs er řnsket
btw.. I forhold til maaange servoer og denslags, ta en titt pĺ
Futabas SBUS-system, eller JRs XBUS. GenialtLeave a comment:
-
hexpod
hei, har ikke vćrt pĺ dette forumet pĺ en god stund, da jeg har holdt pĺ med andre hobbyer. nĺ har jeg i midlertid et langtidsprosjekt, som vil bli lćrerikt for bĺde meg, og de som leser denne trĺden. jeg skal bygge en hexapod, som da er en seksbent robot/drone.
som utgangspunkt bruker jeg trossenrobotics sin phantomx plattform. denne bestilte jeg i dag: http://www.trossenrobotics.com/phantomx-ax-hexapod.aspx
jeg har ogsĺ bestilt en del braketter, kabler, servoer og annet fra crustcrawler. http://www.crustcrawler.com/
man kan altsĺ bygge gĺende roboter med standarservoer, og det er ogsĺ det de fleste gjřr. jeg velger imidlertid ĺ bruke dynamixel servoer, da disse ikke benytter pvm som input/power, men komuniserer altsĺ over en flerpunkts serell kabel. dette reduserer kabelkluss en god del, da en hexapod som regel benytter 18 servoer. dynamixel servoer har ogsĺ muligheten til ĺ sende informasjon om temperatur og motstand tilbake til roboten via serielkabelen, fremfor ĺ ha separate sensorer for dette.
ulempen med dynamixel servoer er at mens de har gode tall pĺ papiret, er de relativt svake under bruk, nĺr man sammenligner med tilsvarende standar servo. sĺ, det blir spennende ĺ fĺ pelle pĺ en ny type servo. her er dokumentasjonen pĺ versjonen jeg har bestilt:
jeg kommer til ĺ lage min egen arduino baserte radio, noen av delene til dette er bestilt, men jeg har ikke rĺd til alt pĺ den biten enda. denne vil ha en 5.8 ghz videomottager og skjerm, med livefeed fra roboten
sĺ, da er det bare ĺ glede seg til alle delene ankommer disse snřdekte topper, sĺ monteringen kan starte. bestilte altsĺ i dag, sĺ det blir vel ikke med det fřrste






Leave a comment: